商機詳情 -
遼寧影像儀說明書
2.5次元影像儀可以提供6環8區的表面光照明,共計48個單獨的分區可控,每個分區都有單獨控制開關以及亮度,高亮度可達256級,每一環的光線射入角度都不同,確保在對不同工件測量時有不同的照明方式,從而使測量達到佳效果,特別針對刀模、鐳雕、工業雙面膠等的測量有良好的輔助作用。這種光源一般配備于七海測量全自動影像儀機臺,CNC自動測量時,儀器自身會自行修正調光。說完了表面光,再說到輪廓光照明,輪廓光,顧名思義即為:將光源放置于物體的背面,與其他的照明方式有很大的不同,因為圖像分析的并非反射光而是射入光。輪廓光照明會產生強烈的對比,此時物體表面的特征會丟失,但是可以清晰的看到物體表面廓形,故而,輪廓光照明被稱之為輪廓光源,輪廓光讓透光和不透光的部分區分開來,透光的地方呈白色而不透光的部分呈現為黑色,這樣一來即可達到一個黑白對比的效果,測量結果,一目了然。輪廓光有一點至關重要,那就是必須保證射出的光線為平行光,而且為同一個強度,否則在不同光線下會導致工件輪廓變形,測量精度更是無從談起了。影像儀以滿足復雜測量需要的精密儀器。遼寧影像儀說明書
二次元影像儀具有哪些測量功能及特點呢?1、巨集指令,同一種工件批量測量更加方便快捷,提高測量效率;2、多點測量點、線、圓、孤、橢圓、矩形,提高測量精度;3、組合測量、中心點構造、交點構造,線構造、圓構造、角度構造;4、座標平移和座標擺正,提高測量效率;5、測量數據可輸入到Excel或Word中,進行統計分析,可割出簡單的Xbar-S管制圖,求出Ca,等各種參數;6、測量數據直接輸入到AutoCAD中,成為完整的工程圖;7、多種語言界面切換;8、快速自動對焦、自動變倍鏡頭;9、記錄用戶程序、編輯指令、教導執行。測量儀特點:1、X、Y軸裝有光柵尺,定位精確。2、運行性能穩定,機構穩定不變形。3、Z軸采用交叉導軌加配重塊的全新設計,鏡頭上下升降受力均衡,確保精度。4、激光定位指示器,精確指定當前測量位置,方便測量。5、LED冷光源(表面光和輪廓光)避免工件受熱變形。6、鏡頭:連續變倍鏡頭。遼寧影像儀說明書影像儀圖像處理技術中邊緣提取有很多不同的方法。
光學影像儀測量有誤差?原理誤差。如CCD攝像頭畸變產生的誤差、測量方法不同而產生的誤差,都屬于影像儀的原理誤差。由于攝像機制造和工藝等原因,以及入射光線在通過各個透鏡時的折射誤差和CCD點陣位置誤差等,實際的光學系統存在著非線性幾何失真,使得目標像點與理論像點之間存在多種類型的幾何畸變:徑向畸變、偏心畸變、薄棱鏡畸變等。使用高質量鏡頭可以減少畸變誤差的影響,但在精密測量中需要考慮到畸變的影響對測量結果進行修正。測量方法不同而產生的誤差主要指不同圖像處理技術帶來的識別、量化誤差。在圖像處理的過程中需要進行邊緣提取,而數字圖像處理技術中邊緣提取有很多不同的方法,選用不同的提取方法會對同一個被測件的邊緣位置產生不小的變化,因此會對的測量結果產生影響。如測量某一圓形工件的半徑和圓心的時候,當圓的輪廓發生變化時,它的半徑值和圓心位置就會相應的發生變化。由此可知,在圖像處理的過程中圖像處理算法對儀器的測量精度有著十分重要的影響,是影像測量所關注的焦點問題。
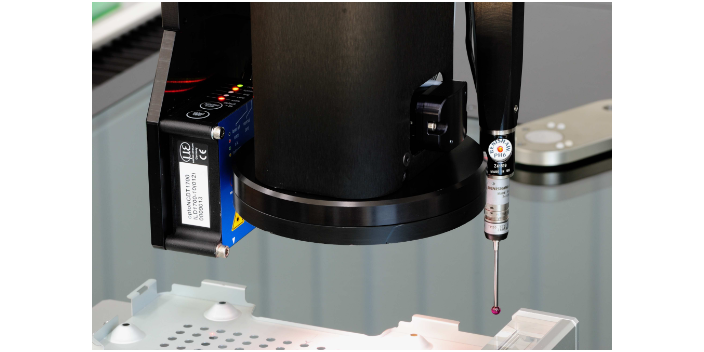
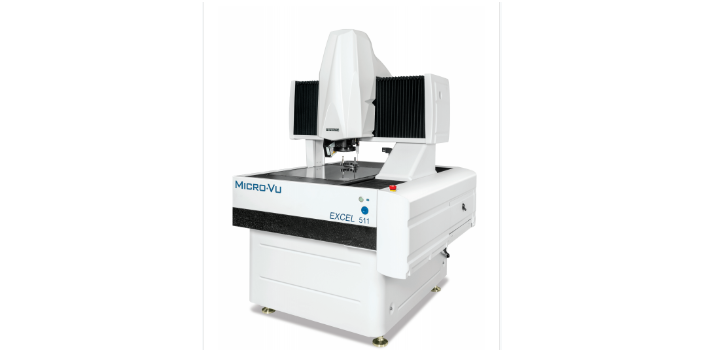
淺談二次元影像儀與汽車行業。影像儀利用影像測頭采集工件的影像,通過數位圖像處理技術提取各種復雜形狀工件表面的座標點,再利用坐標變換和資料處理技術轉換成坐標測量空間中的各種幾何要素,從而計算得到被測工件的實際尺寸、形狀和相互位置關系。隨著科技的不斷發展,二次元影像儀已經被廣大客戶所了解認可,影像儀的應用范圍不斷擴大,可以對各種復雜的工件輪廓和表面形狀進行精密測量,而且在汽車行業的品質檢測中也取到橋梁,互補等必不可少的作用,是汽車行業必備的檢測設備。影像儀受到了越來越多品保人的青睞。
二次元影像儀是屬于精密測量儀器的一種,在產業范圍被普遍的運用。二次元影像的由來,是在投影儀的普通上興盛而來的,同聲,二次元影像儀與投影儀又有著鮮明的各別。影像儀與投影儀之間的區別,重要分為以次幾個上面:影像儀是經過CCD獲得數位圖像,運用計劃機軟硬件演算,以滿足復雜測量需要的精密儀器。投影儀是運用光學投影的原理,將被測處事的表面或外表投影到查看幕(投影屏)上,作測量的一種測量儀器。二次元影像儀:花崗巖石(硬度高,穩定性強,保證精度)。影像儀由于其精度低、檢測效率低、結果不完整,只能檢測零件的邊緣。遼寧影像儀說明書
影像儀在工業中的應用正在成幾何量級的增長。遼寧影像儀說明書
光學影像儀測量有誤差?制造誤差。如導向機構產生的誤差、安裝誤差等,屬于影像儀的制造誤差。導向機構產生的誤差對影像儀來說主要是機構誤差中的直線運動定位誤差。影像儀是正交坐標系測量儀器。正交坐標系測量儀有3根相互垂直的軸線即X、Y、Z三軸,有3個運動部件沿這三根軸線運動,使CCD相對于被測工件作三維直線運動。選用高質量的運動導向機構可以減少此類誤差的影響。安裝誤差則主要在于攝像機與工作臺面之間的相對關系。當測量平臺與CCD攝像機的鏡頭呈現出一定的角度H時,根據幾何學的知識可以得到誤差計算式如下:D=L(1-cosH)。如果影像儀的測量平臺水平性能以及CCD攝像機的安裝十分出色,它們之間的夾角都在范圍以內,此誤差非常小。遼寧影像儀說明書