商機詳情 -
天津多系統適配目標識別售價
雖然現在各種公共交通已十分便捷,但是仍然存在許多無證、無資質的非法車輛,這些車輛無視交通法規,所以超速超載,儼然成為公路安全隱患。例如在車站出入口,經常會有很多人進行拉客,雖然說是坐滿就走,但是為了利益比較大化,超員那是常有的事。再比如暑期來臨,各種培訓班、托兒所成批出現,也由此滋生了許多“黑校車”,為了盡可能的節約成本,常常讓所有學生擠在一輛車內,嚴重危及孩子安全。要想避免事故的發生,則需要警民合作,積極提供線索,而管理部分則迅速行動,對車輛進行追蹤攔截。無人機雙光吊艙用目標識別圖像處理板找成都慧視。天津多系統適配目標識別售價
目標識別
隨著相關技術的迅猛發展,城市智慧治安防控模式也在不斷革新,主要以無人巡邏車、無人機為主要載體。無人巡邏車主要承擔城區巡邏防控、遠程喊話、安防宣傳、視頻巡控等工作任務,這種無人機不需要太大的體積通過搭載AI圖像處理板等傳感器,通過AI智能算法和圖像處理板的共同作用實現智能避障,達到自主巡邏、AI智慧識別的目的。像成都慧視開發的高性能AI圖像處理板Viztra-HE030,采用先進架構,8核處理器,算力能夠達到6.0TOPS,能夠實時檢測無人巡邏車視野范圍內的物體,輔助進行信息收集、避障等操作。天津多系統適配目標識別售價無人機作戰目標識別板卡哪里有?
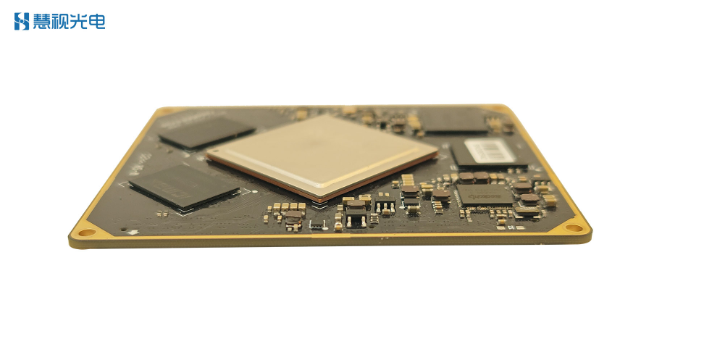
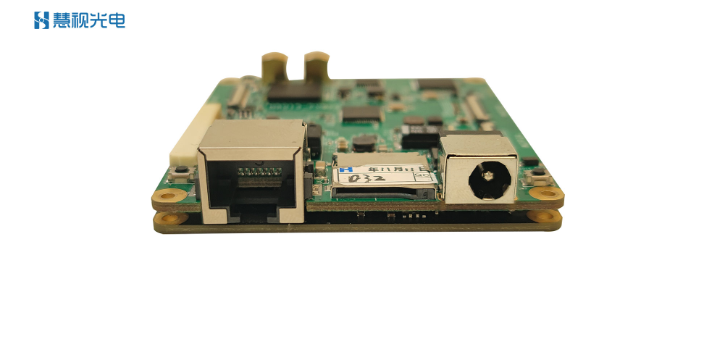
無人機搭載如光電吊艙等帶有攝像頭的設備后,達到了實現智能識別的硬件條件,但是傳統的攝像頭只能獲取圖像,并不具備AI識別的功能。無人機AI識別算法的處理器還是在于模仿人眼一樣進行視覺處理,然后AI進行智能提取和分析圖像,再和訓練模型進行快速比對,從而在無人機快速飛行的過程中做到實時目標識別。首先,要想實現目標識別需要的硬件支持就是AI圖像處理板。圖像處理板通過算法的賦能,就能夠對目標區域的物體進行AI識別分析,從而做出判斷。由于無人機作業的環境復雜,因此對于圖像處理板的要求需要進一步提升。成都慧視開發的Viztra-HE030圖像處理板,采用了工業級芯片RK3588,采用先進架構,8核(4大4小)處理,算力能夠達到6.0TOPS。同時,慧視光電能夠根據需求環境定制豐富的輸出接口。
在硬件的選擇上,慧視光電利用瑞芯微RV1126和RK3588開發的Viztra-LE026圖像處理板和Viztra-HE030圖像處理板已經在定制算法的賦能下,板卡可以根據相機的接口進行深度定制,可以很好地進行小目標的鎖定跟蹤。
而在算法領域,如果企業想要使用自己的算法,我司還可以提供算法訓練提升平臺SpeedDP,這是一個深度學習算法開發平臺,企業可以利用算法模型的開發訓練,通過大量的AI自動圖像標注,能夠讓算法更加聰明,不斷提升自身算法的精度。 FPV目標識別用慧視開發的RV1126圖像處理板。
YOLO系列算法是目標識別領域很重要的技術之一,因為性能強大、消耗算力較少,一直以來都是實時目標檢測領域的主要范式。該框架被用于各種實際應用,包括自動駕駛、監控和物流等行業的目標識別。自今年2月YOLOv9發布以后,清華又推出了YOLOv10,作為計算機視覺領域的突破性框架,具備實時的端到端目標檢測能力,通過提供結合效率和準確性的強大解決方案,延續了YOLO系列的傳統。據悉,YOLOv10在各種模型規模上都實現了SOTA性能和效率。例如,YOLOv10-S在COCO上的類似AP下比RT-DETR-R18快1.8倍,同時參數數量和FLOP大幅減少。與YOLOv9-C相比,在性能相同的情況下,YOLOv10-B的延遲減少了46%,參數減少了25%。慧視光電開發的圖像處理板可以用于目標識別。吉林快速目標識別聯系方式
慧視光電開發的圖像處理板可以用自己的識別算法嗎?天津多系統適配目標識別售價
無人機被廣泛應用于目標跟蹤,其機動靈活的特點對地面的被跟蹤對象而言簡直就是降維打擊。搭載攝像頭以及跟蹤板卡等設備后,無人機可以實現自主飛行,然后通過植入高精度的AI目標跟蹤算法,就能夠分析攝像頭范圍內的物體,通過AI對特征的進一步提取分析,就能夠單獨識別出目標物體形狀,并鎖定其位置。這種技術可以用于各種領域的信息偵查、監視、打擊等任務,比傳統的人工模式更安全更高效。要想實現這樣的技術,可以通過在無人機中安裝光電吊艙,然后在吊艙中植入高性能的AI圖像處理板,通過算法的賦能就能夠實現。天津多系統適配目標識別售價