商機(jī)詳情 -
新疆省時(shí)省力圖像標(biāo)注有哪些
無(wú)人機(jī)是巡檢領(lǐng)域的空中巡檢員,搭載智慧“眼”的無(wú)人機(jī)能夠替代人工,實(shí)現(xiàn)自主巡檢。無(wú)人機(jī)可以搭載紅外光和可見(jiàn)光兩種傳感器,實(shí)現(xiàn)晝夜巡檢也不是夢(mèng),一基桿塔*用十分鐘的時(shí)間便可完成巡檢工作。例如在電力巡檢中,傳統(tǒng)模式下,工人只能采用望遠(yuǎn)鏡遠(yuǎn)程查看線路,不僅費(fèi)眼睛,還費(fèi)時(shí)間。同時(shí),由于光線等外界因素的干擾,缺陷的確認(rèn)也加大了難度,不得不背著安全帶近距離校驗(yàn),工人的安全也受到威脅。而無(wú)人機(jī)則可以在發(fā)現(xiàn)缺陷后,通過(guò)抵近觀察的方式進(jìn)行仔細(xì)查看,收集缺陷周?chē)?60°照片回去分析,不僅安全也高效率。SpeedDP是一個(gè)深度學(xué)習(xí)算法開(kāi)發(fā)平臺(tái)!新疆省時(shí)省力圖像標(biāo)注有哪些

IDEA研究院團(tuán)隊(duì)推出了GroundingDINO?1.5,它能夠?qū)崿F(xiàn)端側(cè)實(shí)時(shí)識(shí)別。在圖像和文本的語(yǔ)義理解上表現(xiàn)出色,能夠快速、準(zhǔn)確地根據(jù)語(yǔ)言提示檢測(cè)和識(shí)別圖像中的目標(biāo)對(duì)象。作為當(dāng)前性能比較好的開(kāi)集檢測(cè)模型,GroundingDINO?1.5Pro可以幫助構(gòu)建海量的具有物體級(jí)別語(yǔ)義信息的多模態(tài)數(shù)據(jù),從而有效地助力多模態(tài)大模型的訓(xùn)練。它可以將長(zhǎng)文本描述中的短語(yǔ)與圖像中的具體對(duì)象或場(chǎng)景精確匹配,以增強(qiáng)AI對(duì)視覺(jué)內(nèi)容和文本之間關(guān)系的理解。目前,成都慧視利用AI圖像處理板和YOLO算法來(lái)實(shí)現(xiàn)對(duì)物體的實(shí)時(shí)監(jiān)測(cè),其中,開(kāi)發(fā)的Viztra-HE030圖像處理板采用了瑞芯微全新一代高性能芯片RK3588,擁有四大四小八核處理器,算力水平能夠達(dá)到6.0TOPS,在我司定制多種視頻接口后,可實(shí)時(shí)對(duì)目標(biāo)進(jìn)行識(shí)別或者人為的的鎖定,同時(shí)可以根據(jù)輸出目標(biāo)的靶量信息,對(duì)目標(biāo)進(jìn)行實(shí)時(shí)跟蹤。安徽國(guó)產(chǎn)化圖像標(biāo)注多少錢(qián)海量的數(shù)據(jù)處理很煩心。
圖像識(shí)別技術(shù)的高價(jià)值應(yīng)用就發(fā)生在你我身邊,例如視頻監(jiān)控、自動(dòng)駕駛和智能醫(yī)療等,而這些圖像識(shí)別進(jìn)展的背后推動(dòng)力是深度學(xué)習(xí)。深度學(xué)習(xí)的成功主要得益于三個(gè)方面:大規(guī)模數(shù)據(jù)集的產(chǎn)生、強(qiáng)有力的模型的發(fā)展以及可用的大量計(jì)算資源。對(duì)于各種各樣的圖像識(shí)別任務(wù),精心設(shè)計(jì)的深度神經(jīng)網(wǎng)絡(luò)已經(jīng)遠(yuǎn)遠(yuǎn)超越了以前那些基于人工設(shè)計(jì)的圖像特征的方法。盡管到目前為止深度學(xué)習(xí)在圖像識(shí)別方面已經(jīng)取得了巨大成功,但在它進(jìn)一步廣泛應(yīng)用之前,仍然有很多挑戰(zhàn)需要我們?nèi)ッ鎸?duì)。
無(wú)人機(jī)在高速公路巡檢中的作用越來(lái)越突出,特別是在十一黃金周這樣的出行高峰,高速公路的安全和暢通至關(guān)重要。傳統(tǒng)的巡檢模式受到人力物力以及時(shí)空的限制,弊端很大,難以實(shí)現(xiàn)精細(xì)大面積的監(jiān)控疏導(dǎo)。無(wú)人機(jī)靈活機(jī)動(dòng)的特點(diǎn)則能夠很好的彌補(bǔ)時(shí)空的局限,而想要進(jìn)一步減少人力物力的付出,則需要打造智能化的無(wú)人機(jī),通過(guò)AI賦能,讓無(wú)人機(jī)更加聰明。打造智能化無(wú)人機(jī)可以在無(wú)人機(jī)吊艙的基礎(chǔ)上加裝高性能的AI圖像處理設(shè)備,成都慧視開(kāi)發(fā)的Viztra-HE030圖像處理板憑借6.0TOPS的算力,用在十一黃金周這樣的出行高峰期就能夠很好地勝任工作,板卡采用了國(guó)產(chǎn)化芯片RK3588,在算法的賦能下,能夠?qū)崿F(xiàn)高效巡檢。Yolo系列算法是典型的onestage算法。
我國(guó)西部地區(qū)地形復(fù)雜、天氣多變,許多電網(wǎng)架設(shè)在高山流水之間,給電網(wǎng)的巡檢維護(hù)造成了不小的困難。于是,不同于傳統(tǒng)人工巡檢的智能化巡檢維護(hù)開(kāi)始逐步應(yīng)用。這種方式采用無(wú)人機(jī)加智能化機(jī)器人,其中無(wú)人機(jī)承擔(dān)巡檢工作,而智能化機(jī)器人進(jìn)行維護(hù),兩者互相配合。無(wú)人機(jī)搭載智能化吊艙,吊艙內(nèi)置圖像識(shí)別傳感器,工程師可以通過(guò)遠(yuǎn)程識(shí)別、抵近觀察等方式,找出問(wèn)題所在。無(wú)人機(jī)機(jī)動(dòng)性靈活性十足,能夠便捷去到許多人工難以到達(dá)的區(qū)域,巡檢無(wú)死角。無(wú)人機(jī)巡檢一次能夠抵得上三個(gè)人工同時(shí)作業(yè),效率成倍提升。圖像算法工程師的工具利器。陜西專(zhuān)業(yè)圖像標(biāo)注哪里買(mǎi)
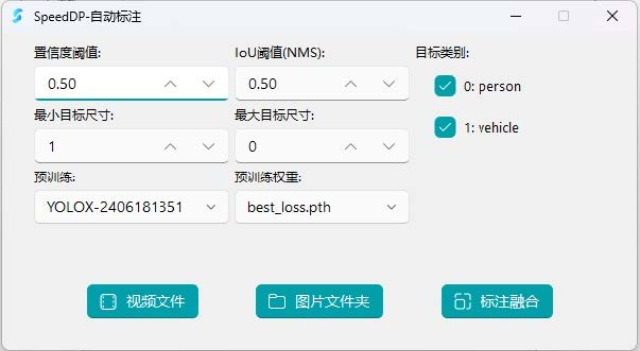
識(shí)別檢測(cè)算法的性能提升依靠大量的圖像標(biāo)注。新疆省時(shí)省力圖像標(biāo)注有哪些
SpeedDP作為一個(gè)服務(wù)型AI平臺(tái),它能提供從數(shù)據(jù)標(biāo)注、模型訓(xùn)練、測(cè)試驗(yàn)證到RockChip嵌入式硬件平臺(tái)模型部署的可視化AI開(kāi)發(fā)功能。平臺(tái)所需算法并不是固定的,使用者可以根據(jù)自身實(shí)際應(yīng)用場(chǎng)景進(jìn)行AI算法的定制化開(kāi)發(fā),例如平臺(tái)經(jīng)過(guò)不斷的迭代,目前能夠支持YOLOv8系列算法進(jìn)行圖像標(biāo)注。SpeedDP這個(gè)平臺(tái)使用起來(lái)十分簡(jiǎn)便,在圖像標(biāo)注領(lǐng)域其基本使用方法是:1.首先有一個(gè)比較好的預(yù)選模型2.用這個(gè)預(yù)選模型做自動(dòng)標(biāo)注3.后期人工審核修正新疆省時(shí)省力圖像標(biāo)注有哪些